Sam2
Segment Anything 2 is an open source image segmentation model.
You can use Segment Anything 2 to identify the precise location of objects in an image. This process can generate masks for objects in an image iteratively, by specifying points to be included or discluded from the segmentation mask.
Execution Modes¶
Segment Anything 2 supports both local and remote execution modes when used in workflows:
- Local execution: The model runs directly on your inference server (GPU strongly recommended)
- Remote execution: The model can be invoked via HTTP API on a remote inference server using the
sam2_segment_image()client method
How to Use Segment Anything¶
To use Segment Anything 2 with Inference, you will need a Roboflow API key. If you don't already have a Roboflow account, sign up for a free Roboflow account. Then, retrieve your API key from the Roboflow dashboard.
How To Use SAM2 Locally With Inference¶
We will follow along with the example located at examples/sam2/sam2_example.py.
We start with the following image,
compute the most prominent mask,
and negative prompt the wrist to obtain only the fist.

Running within docker¶
Build the dockerfile (make sure your cwd is at the root of inference) with
docker build -f docker/dockerfiles/Dockerfile.sam2 -t sam2 .
Start up an interactive terminal with
docker run -it --rm --entrypoint bash -v $(pwd)/scratch/:/app/scratch/ -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2
/app/scratch/ to use them on the host device.
Or, start a sam2 server with
docker run -it --rm -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2
and interact over http.
Imports¶
Set up your api key, and install Segment Anything 2
Note
There's currently a problem with sam2 + flash attention on certain gpus, like the L4 or A100. Use the fix in the posted thread, or use the docker image we provide for sam2.
import os
os.environ["API_KEY"] = "<YOUR-API-KEY>"
from inference.models.sam2 import SegmentAnything2
from inference.core.utils.postprocess import masks2poly
from inference.core.entities.requests.sam2 import Sam2PromptSet
import supervision as sv
from PIL import Image
import numpy as np
image_path = "./examples/sam2/hand.png"
Model Loading¶
Load the model with
m = SegmentAnything2(model_id="sam2/hiera_large")
Other values for model_id are "hiera_small", "hiera_large", "hiera_tiny", "hiera_b_plus".
Compute the Most Prominent Mask¶
# call embed_image before segment_image to precompute embeddings
embedding, img_shape, id_ = m.embed_image(image_path)
# segments image using cached embedding if it exists, else computes it on the fly
raw_masks, raw_low_res_masks = m.segment_image(image_path)
# convert binary masks to polygons
raw_masks = raw_masks >= m.predictor.mask_threshold
poly_masks = masks2poly(raw_masks)
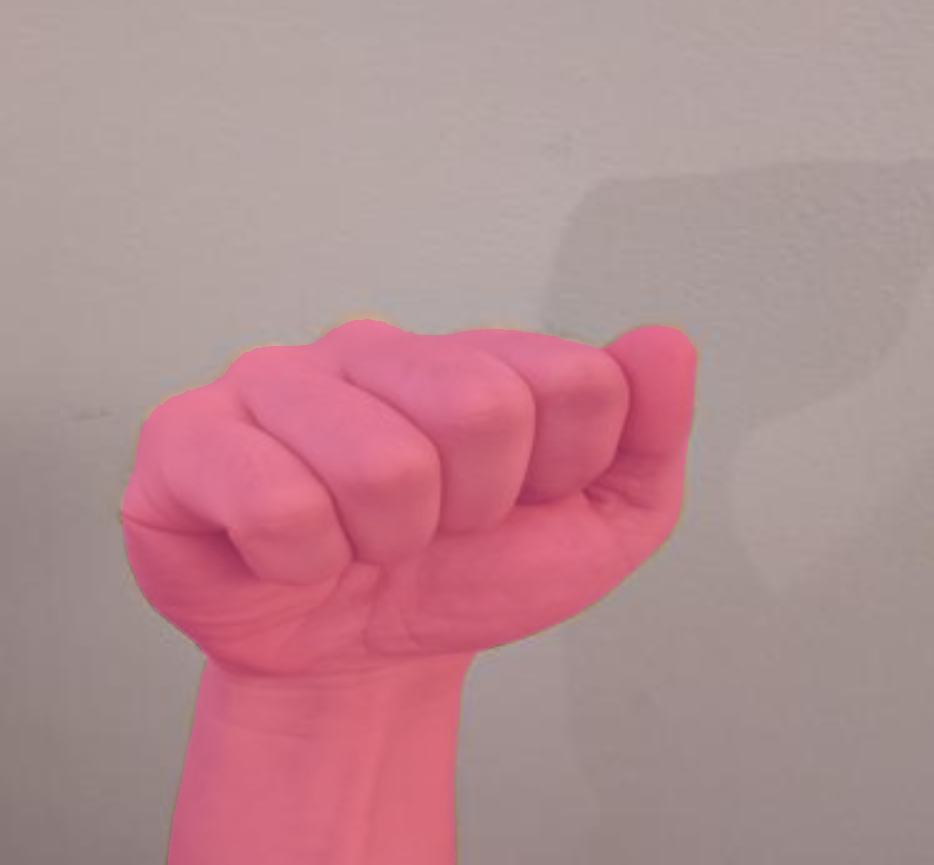
The resulting mask will look like this:
Negative Prompt the Model¶
point = [250, 800]
label = False
# give a negative point (point_label 0) or a positive example (point_label 1)
prompt = Sam2PromptSet(
prompts=[{"points": [{"x": point[0], "y": point[1], "positive": label}]}]
)
# uses cached masks from prior call
raw_masks2, raw_low_res_masks2 = m.segment_image(
image_path,
prompts=prompt,
)
raw_masks2 = raw_masks2 >= m.predictor.mask_threshold
raw_masks2 = raw_masks2[0]
The resulting mask will look like this:
Annotate¶
Use Supervision to draw the results of the model.
image = np.array(Image.open(image_path).convert("RGB"))
mask_annotator = sv.MaskAnnotator()
dot_annotator = sv.DotAnnotator()
detections = sv.Detections(
xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks])
)
detections.class_id = [i for i in range(len(detections))]
annotated_image = mask_annotator.annotate(image.copy(), detections)
im = Image.fromarray(annotated_image)
im.save("sam.png")
detections = sv.Detections(
xyxy=np.array([[0, 0, 100, 100]]), mask=np.array([raw_masks2])
)
detections.class_id = [i for i in range(len(detections))]
annotated_image = mask_annotator.annotate(image.copy(), detections)
dot_detections = sv.Detections(
xyxy=np.array([[point[0] - 1, point[1] - 1, point[0] + 1, point[1] + 1]]),
class_id=np.array([1]),
)
annotated_image = dot_annotator.annotate(annotated_image, dot_detections)
im = Image.fromarray(annotated_image)
im.save("sam_negative_prompted.png")
How To Use SAM2 With a Local Docker Container HTTP Server¶
Build and Start The Server¶
Build the dockerfile (make sure your cwd is at the root of inference) with
docker build -f docker/dockerfiles/Dockerfile.sam2 -t sam2 .
docker run -it --rm -v /tmp/cache/:/tmp/cache/ -v $(pwd)/inference/:/app/inference/ --gpus=all --net=host sam2
Embed an Image¶
An embedding is a numeric representation of an image. SAM uses embeddings as input to calcualte the location of objects in an image.
Create a new Python file and add the following code:
import requests
infer_payload = {
"image": {
"type": "base64",
"value": "https://i.imgur.com/Q6lDy8B.jpg",
},
"image_id": "example_image_id",
}
base_url = "http://localhost:9001"
# Define your Roboflow API Key
api_key = "YOUR ROBOFLOW API KEY"
res = requests.post(
f"{base_url}/sam2/embed_image?api_key={api_key}",
json=infer_payload,
)
This code makes a request to Inference to embed an image using SAM.
The example_image_id is used to cache the embeddings for later use so you don't have to send them back in future segmentation requests.
Segment an Object¶
To segment an object, you need to know at least one point in the image that represents the object that you want to use.
For testing with a single image, you can upload an image to the Polygon Zone web interface and hover over a point in the image to see the coordinates of that point.
You may also opt to use an object detection model to identify an object, then use the center point of the bounding box as a prompt for segmentation.
Create a new Python file and add the following code:
#Define request payload
infer_payload = {
"image": {
"type": "base64",
"value": "https://i.imgur.com/Q6lDy8B.jpg",
},
"point_coords": [[380, 350]],
"point_labels": [1],
"image_id": "example_image_id",
}
res = requests.post(
f"{base_url}/sam2/embed_image?api_key={api_key}",
json=infer_payload,
)
masks = request.json()['masks']
This request returns segmentation masks that represent the object of interest.
Video Tracking in Workflows¶
The SAM2 Video Tracker workflow block (roboflow_core/segment_anything_2_video@v1)
runs SAM2's streaming video predictor frame by frame, keeping per-video temporal
memory so object identities are preserved across frames. Feed it bounding boxes
from an upstream detector; it converts each box to a mask and tracks it on
subsequent frames, emitting instance segmentation predictions whose tracker_id
stays stable for as long as SAM2 follows the object. Masks inherit the class
name, class id, and confidence of the detection that prompted them.
Key properties:
- Stateful and local-only. The block keeps one tracking session per
video_metadata.video_identifier, so it can multiplex many streams, but the session lives in process memory: the block requiresWORKFLOWS_STEP_EXECUTION_MODE=localand is intended to be driven byInferencePipeline, which delivers frames one at a time with video metadata attached. It is not suitable for stateless HTTP requests, and a GPU is required. - Prompt scheduling.
prompt_modecontrols when detector boxes are consumed as prompts:first_frame(default) — prompt once per session, then track silently.every_n_frames— re-seed everyprompt_intervalframes, picking up objects that entered the scene since the last prompt.every_frame— re-seed on every frame; effectively a per-frame detector→mask adapter with SAM-stable tracker ids.
- Model variants.
model_idselects the Hiera backbone size:sam2video/tiny,sam2video/small(default),sam2video/base-plus,sam2video/large. The block also acceptssam3trackervideo— SAM3's visually prompted tracker, which uses the same box-prompt contract but a much larger backbone. It is markedly better at keeping object identities on long videos and in crowded scenes (see the SAM3 paper's VOS results), at higher compute cost; treat it as the max-quality tier and thesam2videosizes as the speed tiers.
Example¶
from inference import InferencePipeline
from inference.core.interfaces.stream.sinks import render_boxes
WORKFLOW = {
"version": "1.0",
"inputs": [{"type": "InferenceImage", "name": "image"}],
"steps": [
{
"type": "roboflow_core/roboflow_object_detection_model@v2",
"name": "detector",
"images": "$inputs.image",
"model_id": "yolov8n-640",
},
{
"type": "roboflow_core/segment_anything_2_video@v1",
"name": "tracker",
"images": "$inputs.image",
"boxes": "$steps.detector.predictions",
"prompt_mode": "every_n_frames",
"prompt_interval": 30,
},
],
"outputs": [
{
"type": "JsonField",
"name": "predictions",
"selector": "$steps.tracker.predictions",
}
],
}
pipeline = InferencePipeline.init_with_workflow(
video_reference="path/to/video.mp4", # or an RTSP URL / camera id
workflow_specification=WORKFLOW,
on_prediction=render_boxes,
api_key="<YOUR-API-KEY>",
)
pipeline.start()
pipeline.join()
For open-vocabulary video tracking from text prompts (no upstream detector), see the SAM3 Video Tracker block in the SAM 3 documentation.